
When drones operate in busy and unpredictable areas, avoiding collisions becomes a major challenge. Traditional systems only react to immediate threats, which slows drones down and increases risks, especially in fast-paced environments. Predictive modeling changes the game by allowing drones to foresee obstacles and adjust their paths in advance, improving safety and efficiency.
Here’s a quick rundown of three key methods:
- Artificial Potential Field (APF): Simple and fast, but struggles with obstacles in dynamic or tight spaces. Best for basic, low-complexity scenarios.
- Model Predictive Control (MPC): Offers precise path planning and safety by predicting future movements but requires significant computing power.
- Optimal Reciprocal Collision Avoidance (ORCA): Efficient for managing multiple drones by splitting avoidance responsibility but has limits in complex or edge cases.
Each method has trade-offs, and combining techniques, like APF with MPC, can address their individual weaknesses. Recent research shows drones can now navigate faster and safer using these advanced approaches, even in challenging environments.
RVC-NMPC: NMPC with Reciprocal Velocity Constraints for Mutual Collision Avoidance of Agile UAVs
1. Artificial Potential Field (APF) Methods
The Artificial Potential Field (APF) approach treats obstacles as sources of repulsion and the target as a source of attraction. As a drone gets closer to an obstacle, the repulsive force increases, creating a buffer zone to maintain safety. This repulsive force activates when the drone crosses a predefined threshold distance ($d_{thd}$). The mathematical expression for the repulsive potential is:
$U_{rep} = \frac{1}{2} k_{rep} \left(\frac{1}{D} - \frac{1}{d_{thd}}\right)^2$,
where $D$ is the distance to the obstacle, and $k_{rep}$ determines the strength of the repulsive force.
One of APF's biggest advantages is its simplicity and speed. According to Kyuman Lee, APF can efficiently generate smooth paths. Unlike algorithms like A*, which can slow down in complex environments, APF relies on straightforward gradient calculations that are quick to execute, even on drones with limited onboard processing power. However, this speed comes with limitations, particularly in dynamic and cluttered environments.
A key challenge with APF is its vulnerability to local minima. This happens when the attractive and repulsive forces cancel each other out, leaving the drone stuck before reaching its destination. Another issue is the "Goal Non-Reachable with Obstacles Nearby" (GNRON) problem. If the target is located within an obstacle's repulsive zone, the drone may never reach it due to the safety buffer. Additionally, the standard APF method does not account for the velocity or direction of moving obstacles. As Nikita Vaibhav Pavle highlights:
The conventional Artificial Potential Field (APF) is fundamentally limited by the local minima issue and its inability to account for the kinematics of moving obstacles.
To overcome these challenges, researchers have introduced several improvements. For instance, developments in December 2025 led to the creation of Direction and Velocity-Adaptive APF. This enhancement adjusts the repulsive forces based on the relative speed of obstacles. Modern approaches also integrate APF with techniques like Model Predictive Control or Motion Primitives. These combinations allow drones to navigate dynamic environments while respecting physical constraints, such as acceleration limits, jerk control, and full 6-DOF dynamics.
However, in tight spaces or when multiple obstacles exert opposing forces, drones may experience jitter - unstable oscillations that can compromise stability. While APF excels in real-time performance, it can struggle in cluttered environments. For industrial UAV applications requiring quick responses and limited computational resources, APF is most effective when used as part of a hybrid navigation system.
2. Model Predictive Control (MPC) Approaches
While APF can falter in dynamic environments, Model Predictive Control (MPC) takes a more forward-thinking approach by predicting and optimizing future trajectories over a set time horizon. Instead of reacting to immediate forces, MPC evaluates multiple potential paths and picks the one that balances safety and efficiency. Advanced versions like Robust Nonlinear MPC (NMPC) even account for uncertainties in sensor data and the predicted movements of other aircraft, making it a reliable choice for collision avoidance under imperfect conditions.
In October 2025, researchers Pavel Pochobradský and Martin Saska from the Multi-robot Systems Group at Czech Technical University in Prague introduced the Geometric Model Predictive Path Integral (GMPPI) controller. Their GPU-accelerated system showcased impressive latency management compared to traditional modular planning methods.
A year earlier, in July 2024, researchers Dora Novak and Sihem Tebbani conducted a comparison of three NMPC strategies for multi-UAV agricultural mapping using DJI Mavic 3 drones. Their Monte Carlo simulations highlighted key trade-offs between computational demand and efficiency. The "Nonlinear Constraint" method delivered the best collision avoidance performance, with a processing time of 0.89 seconds per optimization. In contrast, the "Safe Flight Corridor" approach was faster at 0.46 seconds but slightly less effective. When collision constraints were relaxed into a "penalty cost" to save on computational resources, tracking accuracy dropped significantly, with mean position errors increasing from 0.15 meters to 0.51 meters.
"The computationally efficient algorithm for computing RVCs, together with the direct integration of these constraints into NMPC problem formulation on a controller level, allows the whole pipeline to run at 100 Hz." - Vit Kratky, Researcher, Czech Technical University
Building on these advancements, Reciprocal Velocity Constraints (RVC) have further boosted MPC's efficiency in managing multi-UAV operations. RVC-NMPC can now process at 100 Hz, enabling collision-free navigation for up to 10 UAVs traveling at speeds of 25 m/s. This method has also reduced flight times by 31% compared to earlier approaches. By fine-tuning physical parameters, MPC controllers can seamlessly adapt to different UAV models. For industries requiring precise trajectory tracking with strict safety requirements, MPC provides a mathematically rigorous framework. However, its computational intensity means it performs best with GPU acceleration or distributed processing setups.
sbb-itb-ac6e058
3. Optimal Reciprocal Collision Avoidance (ORCA)
Optimal Reciprocal Collision Avoidance (ORCA) takes a unique approach to managing potential collisions by evenly dividing the responsibility among all agents involved. In this system, each UAV (unmanned aerial vehicle) assumes half the responsibility for avoiding a collision with another UAV. This shared burden is grounded in a mathematical framework that ensures collision-free movement as long as all agents follow the same principles. The method works by identifying velocities outside the "Velocity Obstacle" zones created by other UAVs. These calculations are structured as a low-dimensional linear program, making the process computationally efficient .
One of ORCA's standout features is its ability to handle large-scale scenarios with impressive speed. The algorithm can calculate collision-free movements for thousands of agents in just milliseconds. In fact, simulations have shown ORCA managing up to 25,000 agents simultaneously. Its lightweight nature and near-linear scaling with the number of obstacles make it particularly appealing for real-time applications, especially in environments where computational resources are limited.
"Selecting the optimal action for each agent is reduced to solving a low-dimensional linear program, and we prove that the resulting motions are smooth." - Jur van den Berg, Stephen J. Guy, Ming Lin, and Dinesh Manocha
In December 2025, researchers Vit Kratky and Martin Saska showcased the practical capabilities of ORCA-based systems. By using reciprocal velocity constraints, their system achieved an operational frequency of 100 Hz while supporting UAV accelerations up to 98.4 ft/s² (30 m/s²). The results also highlighted efficiency improvements in flight path management, including shorter mission completion times. When integrated with the Dynamic Window Approach, ORCA further reduced flight path lengths by 28% and mission durations by 17%.
However, ORCA is not without its limitations. The standard model assumes that UAVs can respond instantaneously, which is not realistic for real-world dynamics. It also struggles in "degenerate situations", such as when aircraft travel parallel paths at constant speeds without crossing each other's trajectories. To address these weaknesses, enhancements like combining ORCA with Differential Dynamic Programming have been introduced, offering potential solutions for these dynamic challenges.
Advantages and Disadvantages
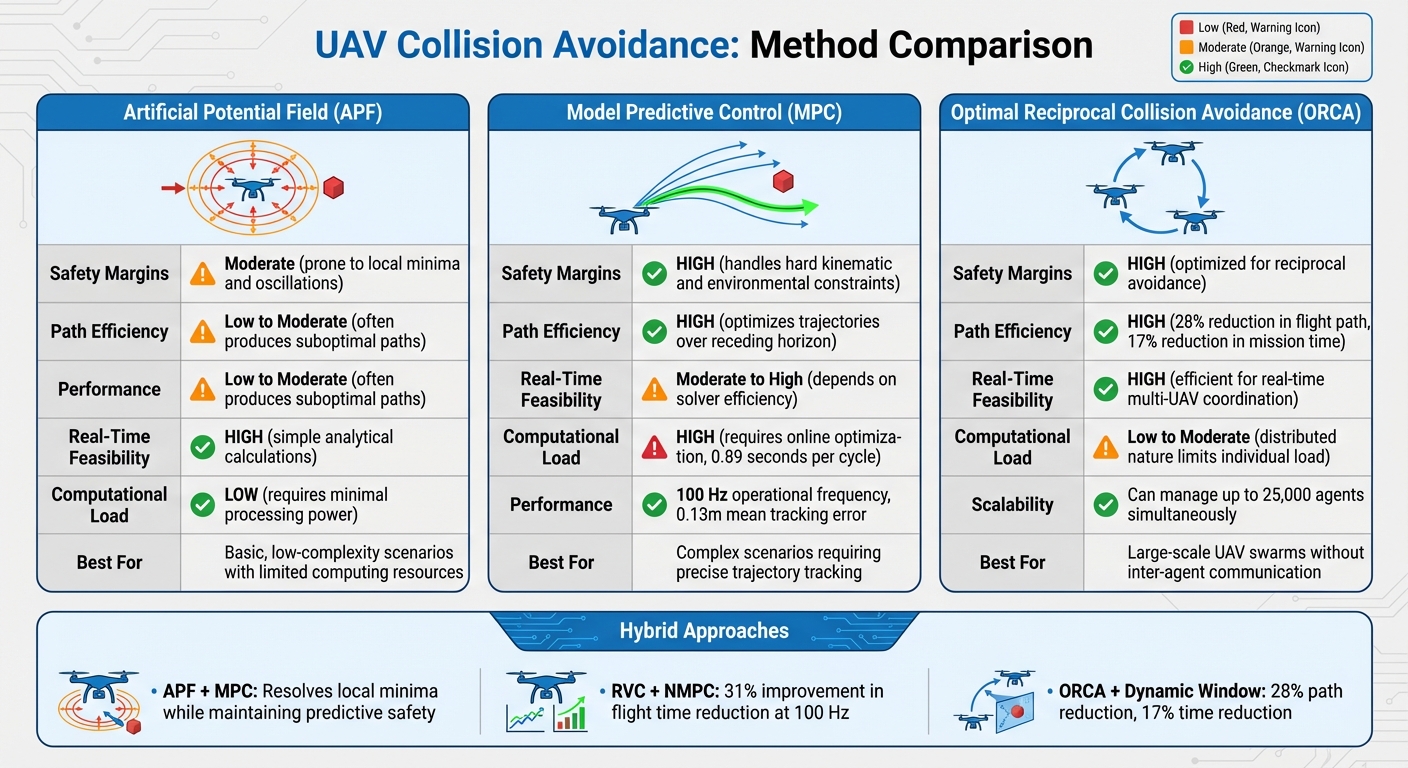
Comparison of UAV Collision Avoidance Methods: APF vs MPC vs ORCA
Each predictive modeling method in UAV collision avoidance comes with its own strengths and trade-offs. These differences allow operators to select the approach that aligns best with their mission requirements. Below is a breakdown of the advantages and limitations of key methods based on earlier discussions.
Artificial Potential Field (APF) is known for its quick execution and minimal computational requirements. It simulates UAV movement using virtual forces, making it a straightforward solution. However, this simplicity comes at a cost - it struggles with local minima and often generates less-than-ideal paths, especially in dynamic environments.
Model Predictive Control (MPC) stands out for its ability to incorporate kinematic constraints and predict future trajectories, ensuring a high level of safety. Advanced Nonlinear MPC (NMPC) frameworks can operate at 100 Hz with mean tracking errors as low as 0.13 meters (0.43 feet). However, this accuracy requires solving complex optimization problems, which takes an average of 0.89 seconds per cycle. As Federico Corraro from the Italian Aerospace Research Center explains:
Numerical Optimization approaches... require much more computational effort in view of the higher reliability and accuracy of the solution.
For those seeking a computationally efficient option, Optimal Reciprocal Collision Avoidance (ORCA) provides a solid alternative. It uses mathematically optimized reciprocal avoidance to maintain high safety margins while keeping computational demands low. When combined with the Dynamic Window Approach, ORCA has shown a 28% reduction in flight path length and a 17% decrease in mission completion time. Its distributed design eliminates the need for inter-agent communication, making it particularly effective for large UAV swarms. However, its simplified assumptions can limit its adaptability in more complex scenarios.
The table below summarizes the performance metrics of these methods:
| Feature | Artificial Potential Field (APF) | Model Predictive Control (MPC) | Optimal Reciprocal Collision Avoidance (ORCA) |
|---|---|---|---|
| Safety Margins | Moderate; prone to local minima and oscillations | High; handles hard kinematic and environmental constraints | High; optimized for reciprocal avoidance |
| Path Efficiency | Low to Moderate; often produces suboptimal paths | High; optimizes trajectories over a receding horizon | High; reduces flight path length and mission completion time |
| Real-Time Feasibility | High; simple analytical calculations | Moderate to High; depends on solver efficiency and horizon length | High; efficient for real-time multi-UAV coordination |
| Computational Load | Low; requires minimal processing power | High; requires online optimization | Low to Moderate; distributed nature limits individual agent load |
Hybrid approaches are emerging to address the limitations of these individual methods. For example, integrating APF into an MPC framework can resolve local minima issues while retaining predictive safety. Similarly, combining Reciprocal Velocity Constraints with NMPC has led to a 31% improvement in flight time reduction, all while maintaining a 100 Hz operational frequency. These advancements highlight the potential of blending techniques to optimize UAV performance in collision avoidance scenarios.
Conclusion
When choosing a predictive modeling approach, it's essential to align the method with your operational needs. For dynamic industrial environments, Model Predictive Control (MPC) and its variants are often the go-to choice. They seamlessly combine planning and control while adhering to full kinematic constraints, making them ideal for complex scenarios. Hybrid APF-MPC solutions offer an added advantage by integrating planning and control without requiring extensive retraining - a critical feature in industries where UAV platforms and mission parameters frequently shift.
These techniques go beyond optimizing flight paths; they have direct applications in industrial inspections. For example, in site inspections involving LiDAR and orthomosaic data, embedding depth sensing directly into the predictive controller reduces latency and ensures better sensor overlap. This setup allows UAVs to respond faster by bypassing the need to construct a complete environment map first.
To further enhance performance, GPU parallelization can be utilized to evaluate thousands of potential trajectories simultaneously. This enables real-time collision assessments using LiDAR data without causing computational delays. Platforms like Anvil Labs, which work with LiDAR point clouds and orthomosaics, stand to benefit significantly from these advanced collision avoidance systems. These technological advancements open the door to more adaptable and efficient strategies for avoiding obstacles.
Looking ahead, combining methods like APF, MPC, and ORCA will enable systems to adapt dynamically to changing conditions. Future solutions will likely focus on adaptive collision avoidance, factoring in variables like obstacle velocity, sensor range, and the criticality of the mission. By integrating velocity-adaptive APF into an MPC framework, UAVs will be able to react swiftly to fast-moving obstacles while maintaining smooth and precise flight paths - ensuring high-quality data collection.
FAQs
How does combining Artificial Potential Fields (APF) with Model Predictive Control (MPC) enhance UAV collision avoidance?
Integrating Artificial Potential Fields (APF) with Model Predictive Control (MPC) brings a powerful synergy to UAV collision avoidance. APF offers quick, real-time responses to nearby obstacles by applying local repulsive forces, ensuring the UAV can react instantly to potential hazards. On the other hand, MPC focuses on calculating an optimal path that considers the UAV's dynamics, actuation constraints, and overall mission goals.
This blend allows UAVs to handle sudden obstacles with ease while adhering to a well-planned, efficient trajectory. By combining fast, localized obstacle avoidance with comprehensive path planning, UAVs navigate complex environments with improved precision and safety.
What kind of processing power is needed to run Model Predictive Control (MPC) on UAVs?
To apply Model Predictive Control (MPC) to UAVs, the onboard processor must be capable of executing optimizations fast enough to maintain a control loop running at about 100 Hz. This frequency ensures the UAV can adapt to changes in its environment in real-time.
The exact processing power required will vary based on the complexity of the UAV’s model and its mission objectives. However, lightweight processors built for embedded systems are commonly chosen, as they strike a balance between performance and energy efficiency.
Can ORCA effectively handle dynamic real-world scenarios?
ORCA faces challenges in handling some dynamic, real-world situations, especially when agents move at steady or nearly steady speeds. These scenarios, referred to as degenerate cases, can reduce its overall effectiveness.
To tackle these limitations, advancements like CS-ORCA and Dual-Horizon ORCA have been introduced. These extensions improve ORCA's ability to navigate complex environments, making it more reliable in managing unpredictable and fast-changing conditions, such as UAV collision avoidance.
